
Planning an Automated Mission
Via QGC on the Herelink

In the “Camera” section, select “Custom Camera” and enter the following parameters: Sensor Width: 35.81 mm Sensor Height: 23.88 mm Image Width: 7360 px Image Height: 4912 px Focal length: 21.0 mm (or whatever focal length you have for your lens)

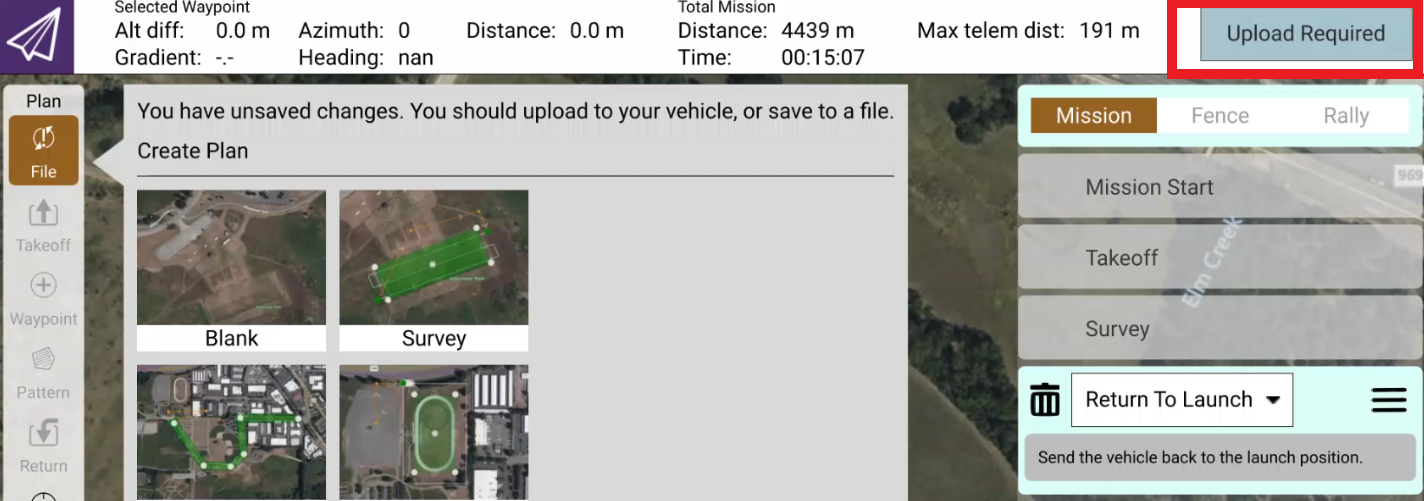
You can adjust the Turnaround distance and select various options, such as whether the camera captures images during the turnarounds or not. You’ll also see the area, photo count, photo interval, and trigger distance for this particular mission.


You can now remove the SD card and copy the files over to your computer. When you right-click on the image and select “Properties”, you should be able to go into the “Details” tab and see the GPS information on the image:

Via Mission Planner
In “Grid Options” you will mostly adjust overlap and sidelap so that you ensure you have adequate coverage for the mission. The “OverShoot” and “LeadIn” is also used to ensure the system turns around completely before starting to capture images again. 10-20m is a good setting.







Last updated